The moddoMOUSE Arduino Library provides a simple API for communicating with the moddoMOUSE Main Board over I2C/TWI, handling all the low-level register reads and writes for you.
Installation
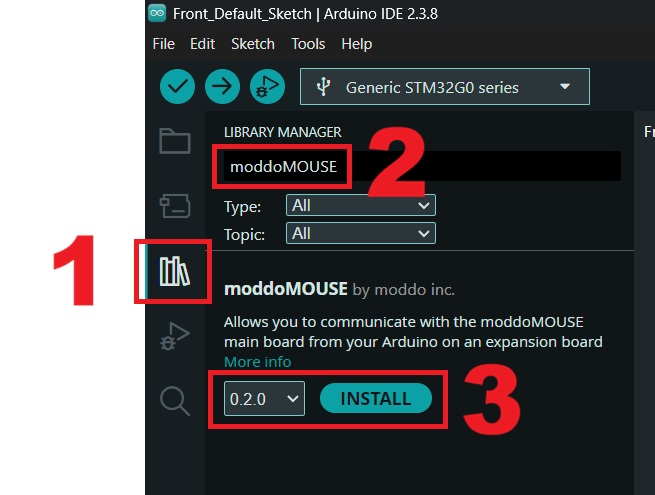
The library is officially listed in the Arduino Library Manager. To install it:
- Open the Arduino IDE
- Go to Sketch → Include Library → Manage Libraries
- Search for moddoMOUSE
- Select latest version and click Install
Alternatively, you can install it manually by downloading the ZIP from the GitHub repository and going to:
Sketch → Include Library → Add .ZIP Library
Getting Started
Include the library and create a moddoMOUSE object at the top of your sketch:
#include <moddoMOUSE.h>
moddoMOUSE mouse;
Then call begin() in your setup() to initialise the connection:
if (mouse.begin() != 0) {
Serial.println("Failed to connect to moddoMOUSE");
}
begin() verifies the product ID of the Main Board and clears any previously set interrupts. It accepts optional parameters if you need to specify a custom I2C address or TwoWire instance:
mouse.begin(MODDOMOUSE_I2C_ADDRESS, Wire);
Error Handling
All library methods return an int8_t. A return value of 0 indicates success. Negative values indicate an error:
| Return Value | Meaning |
|---|
0 | Success |
-EIO (–5) | I2C communication error |
-EINVAL (–22) | Invalid argument (e.g. value out of range) |
Low Power
Since the expansion board is powered by the mouse battery, keeping power consumption low is important. The library provides suspend() and resume() to release and re-acquire the I2C bus around sleep periods:
mouse.suspend();
LowPower.sleep();
mouse.resume();
All the included examples support low power mode when running on a SAMD-based Arduino (e.g., Arduino MKR Zero and Seeed XIAO M0). To enable it, set USE_LOW_POWER_IF_SUPPORTED to 1 at the top of the sketch and it is enabled by default. Without low power support, idle power consumption can be approximately 200x higher, which will drain the mouse battery significantly faster.
💡 Low power mode disables Serial output and USB. If you are debugging, set USE_LOW_POWER_IF_SUPPORTED to 0 to keep Serial and USB active.
API Reference
Initialization
| Method | Description |
|---|
begin(address, wirePort) | Initialise I2C connection to the Main Board. address defaults to 0x0A, wirePort defaults to Wire. Returns 0 on success. |
suspend() | Release the I2C bus. Call before putting the microcontroller to sleep to save power. |
resume() | Re-acquire the I2C bus. Call after waking from sleep. |
Device Info
| Method | Description |
|---|
getProductID(value) | Reads the product ID into *value. Always 0x01 for moddoMOUSE. |
getDeviceID(value) | Reads the unique 16-bit device ID into *value. |
Motion
| Method | Description |
|---|
getMotion(x, y) | Reads accumulated X/Y motion deltas into *x and *y. Resets the accumulator on read. Either pointer can be NULL to ignore that axis. |
| Method | Description |
|---|
getMainButtons(left, right, middle, back, forward) | Reads the current state of the five main mouse buttons. Any pointer can be NULL to ignore that button. |
setButtons(button_bits) | Writes a 32-bit bitmask of expansion board button states to the Main Board. Each bit represents one button: set to 1 when pressed, 0 when released. |
Battery
| Method | Description |
|---|
getBatteryStatus(status) | Reads battery and charger status into a batteryStatus struct. |
| Method | Description |
|---|
setVerticalWheel(delta) | Sends a vertical scroll delta to the Main Board. |
getVerticalWheel(delta) | Reads the current accumulated vertical scroll delta into *delta. |
setHorizontalWheel(delta) | Sends a horizontal scroll delta to the Main Board. |
getHorizontalWheel(delta) | Reads the current accumulated horizontal scroll delta into *delta. |
Settings
| Method | Description |
|---|
setDpiSettings(x, y) | Sets the DPI/CPI for X and Y axes independently. Valid range: 50–26,000. |
getDpiSettings(x, y) | Reads the current DPI/CPI settings into *x and *y. |
setPollingRate(pollingRate) | Sets the polling rate. One of: POLLING_RATE_125, POLLING_RATE_250, POLLING_RATE_500, POLLING_RATE_1000. |
getPollingRate(pollingRate) | Reads the current polling rate into *pollingRate. |
setLiftDistance(liftDistance) | Sets the lift-off distance. One of: LIFT_DISTANCE_1MM, LIFT_DISTANCE_2MM. |
getLiftDistance(liftDistance) | Reads the current lift-off distance into *liftDistance. |
setInvertSwapSettings(invert_x, invert_y, swap_xy) | Sets axis inversion and swap. |
getInvertSwapSettings(invert_x, invert_y, swap_xy) | Reads current axis inversion and swap settings. |
setAngleTune(angle) | Sets the angle tune offset in degrees. Valid range: –30 to +30. |
getAngleTune(angle) | Reads the current angle tune offset into *angle. |
Interrupts
| Method | Description |
|---|
setMotionInterrupt(enable) | Enables or disables the motion interrupt on the INT pin. |
setMainButtonsInterrupt(enable) | Enables or disables the main buttons interrupt on the INT pin. |
setBatteryChangeInterrupt(enable) | Enables or disables the battery change interrupt on the INT pin. |
disableAllInterrupts() | Disables all interrupts and clears the INT pin state. |
Data Types
batteryStatus
| Field | Type | Description |
|---|
batteryVoltage | uint16_t | Battery voltage in millivolts |
batteryCapacity | uint8_t | Battery capacity in percent (0–100), or 255 (MODDOMOUSE_BAT_CAPACITY_UNKNOWN) if unknown |
batteryPresent | uint8_t (1 bit) | 1 if a battery is connected |
batteryCharging | uint8_t (1 bit) | 1 if charging, 0 if discharging |
health | uint8_t (5 bits) | Charger health condition — see charger_health enum |
externalSupply | uint8_t (1 bit) | 1 if USB power is connected |
charger_health Enum
| Value | Description |
|---|
CHARGER_HEALTH_UNKNOWN | Health condition unknown |
CHARGER_HEALTH_GOOD | Charger is healthy |
CHARGER_HEALTH_OVERHEAT | Charger is overheated |
CHARGER_HEALTH_OVERVOLTAGE | Battery voltage exceeded overvoltage threshold |
CHARGER_HEALTH_UNSPEC_FAILURE | Unspecified failure |
CHARGER_HEALTH_COLD | Battery temperature below cold threshold |
CHARGER_HEALTH_WATCHDOG_TIMER_EXPIRE | Watchdog timer expired |
CHARGER_HEALTH_SAFETY_TIMER_EXPIRE | Safety timer expired |
CHARGER_HEALTH_CALIBRATION_REQUIRED | Calibration required |
CHARGER_HEALTH_WARM | Battery temperature in warm range |
CHARGER_HEALTH_COOL | Battery temperature in cool range |
CHARGER_HEALTH_HOT | Battery temperature above hot threshold |
CHARGER_HEALTH_NO_BATTERY | No battery detected |
pollingRateOptions Enum
| Value | Polling Rate |
|---|
POLLING_RATE_125 | 125 Hz |
POLLING_RATE_250 | 250 Hz |
POLLING_RATE_500 | 500 Hz |
POLLING_RATE_1000 | 1000 Hz |
liftDistanceOptions Enum
| Value | Lift Distance |
|---|
LIFT_DISTANCE_1MM | 1mm |
LIFT_DISTANCE_2MM | 2mm |